Thought I would create a thread on an RC system I started developing this year. It is based on radio systems I have incorporated into other projects. I appreciate any feedback on the system. I will attempt to explain the overall direction and trade-offs made in design so far. The radio control system consists of a transmitter and multiple receivers. There are both locomotive and accessory receivers. The system is currently limited to controlling 32 simultaneous locomotives. 100 non-locomotive accessories can currently be addressed. One of the main requirements of the system is low cost. At this time the transmitter costs under $120 in parts and each receiver with motor controller is under $70. Remember this is single unit development costs and the devices must be soldered together and programmed. The transmitter controls both locomotives and accessories. It is microcontroller based and operates over inexpensive 433 MHz data radios. The transmitter has an LCD display, 12 key matrix keypad, two push button switches and a rotary encoder for speed. Here is a picture of the transmitter:
![]()
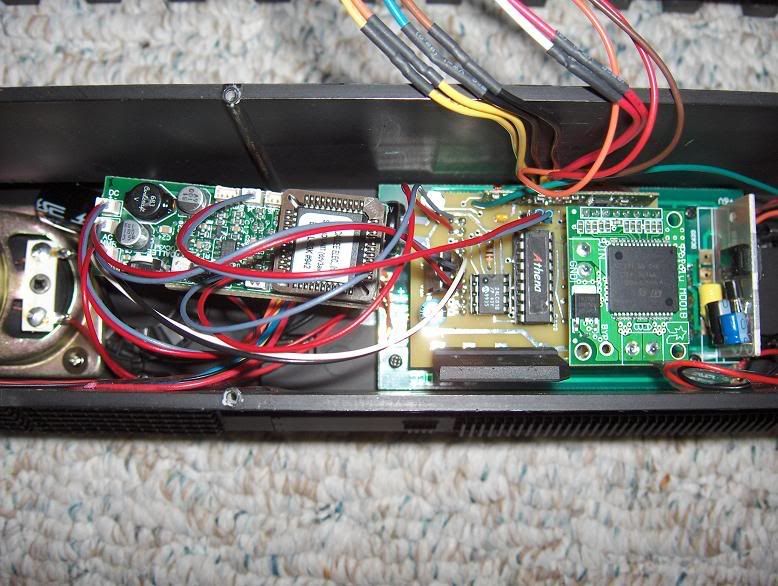
The receivers are designed around the Aristocraft DCC plug and provide control over locomotive functions. The following is a list of capabilities: - Speed control (256 steps) - Direction - Directional lighting - Bell (latched) - Horn/Whistle (momentary) - Accessory 1 (latched) - Accessory 2 - 4 (momentary) - 30 amp DC motor controller (14 amp without heat sink) - Overvoltage protection - Thermal protection - Fail safe shutdown on signal loss (from transmitter) - Setup storage of address, motor control, and default direction - Open digital radio design (433 MHz, 315 MHz, other) - 100 + yard range - Short antenna length - Minimized radio interference from other sources - Reliable operation on even dirty track - Ability to operate on battery - Ability to operate on AC track voltage Here is a picture of the receiver with daughter card motor controller:

Here is a picture of the receiver plugged into an Aristocraft SD-45:

Operation is very straightforward. Here is a video showing operation of three locomotives simultaneously: [url=http://s68.photobucket.com/albums/i27/rmcintir/Robotics/?action=view¤t=HPIM2909.flv]

[/url] Currently the system uses 433 MHz data radios operating at 2400 baud. I have tested several different manufacturer’s radios with good interoperability results. Other frequency radios could be used with similar results. The system is designed around a single transmitter. I am currently working on handling multiple cabs via an interface to the main transmitter. The first interface will be to a personal computer which will provide both multiple cabs and automation. Interference is always a concern with radio control systems. The system is fairly immune to outside radio interference. The only interference recorded so far has been from another 433 MHz transmitter operating continuously next to (or between the transmitter and) locomotives. If the intentional interference was located outside the line of site of the receiving locomotives there was no noticeable interruption to operation. Two way transceivers were not selected in order to control costs of both the radio itself and the additional complexity and expense of higher capability microcontrollers in the receivers. My original design concept called for Zigbee transceivers but the development radios are quite costly and unless purchased in significant quantity receivers are simply too expensive. Hopefully this will eventually change and the radio protocol will not exclude using these radios in future designs. A single transmitter was selected to reduce complexity. All traffic to locomotives and accessories must flow through the main transmitter. This is to allow a single device to maintain the status of all controlled devices as well as simplify the radio protocol. Typically a single engineer will be controlling multiple locomotives so this design constraint provides for faster development. As noted above multiple cab control is being designed and will initially be through a PC interface, possibly with wireless devices. While this adds to the complexity of supporting multiple cabs it allows significant capability for automation and a wide variety of wireless ethernet devices to be incorporated as cab controls. Once I have the basics worked out I plan on publishing everything required to build the transmitters and receivers and open the basic wireless protocols and microcontroller programming. If you have any ideas or concerns please feel free to let me know. Now is the time as it is still fairly early in development.


{kind=link}
{kind=link}